




Investigadores de la Universidad de Harvard desarrollan Termes, una colonia de pequeños robots-insecto capaces de erigir estructuras arquitectónicas a partir de ladrillos prefabricados. El proyecto simula la inteligencia social de las termitas en una microsociedad de autómatas capaces de actuar autónomamente y sin la supervisión de ningun ordenador central. De esta manera, Termes abre las puertas a una nueva manera de entender la arquitectura, un paradigma donde la inteligencia colectiva de la colmena sustituye a la mentalidad individual del hombre.
Termes, Universidad de Harvard, 2014.
Termes es un proyecto capitaneado por un grupo de ingenieros, biólogos y expertos en informática de la Harvard SEAS (School of Engineering and Applied Sciences) y el Wyss Institute for Biologically Inspired Engineering. Presentado hace un par de semanas en la AAAS 2014 Annual Meeting y publicado en la revista Science el pasado mes de febrero, Termes consiste en una brigada de robots-insecto constructores que actúan en función de una inteligencia colectiva descentralizada.
Tras más de cuatro años de investigación, el equipo de Boston ha conseguido implementar en los autómatas una suerte de inteligencia de colmena que se inspira en las colonias de termitas africanas. Frente a otras estrategias evolutivas, la inteligencia distribuida de los insectos resulta especialmente propicia en la construcción de arquitecturas, ya que no se requiere una organización jerárquica ni una supervisión del proyecto: cada miembro de la colonia actúa por instinto, sin por ello caer en automatismos rígidos. El resultado es una arquitectura resiliente, compleja y veloz.
 Termes, Universidad de Harvard, 2014.
Termes, Universidad de Harvard, 2014.
Termes replica estos principios gracias a un programa informático que, en vez de determinar patrones de comportamiento estrictos, plantea instrucciones sencillas que se adaptan a las condiciones del entorno y a las tipologías de construcción. La inteligencia del sistema no reside propiamente en el ADN informático, sino en la coordinación que se establece entre los distintos robots. De su interacción y comunicación con el medio surgen nuevas instrucciones que modifican constantemente los procedimientos de actuación.
Una de las piezas clave del proyecto descansa en la estigmergia, un lenguaje utilizado por ciertas especies de insectos que fue teorizado por primera vez por el científico Pierre-Paul Grassé. Este lenguaje se fundamenta en la comunicación indirecta y descentralizada de los insectos a través de microcambios en el entorno natural: una hormiga puede, por ejemplo, impregnar una pequeña roca con feromonas, modificar la temperatura del aire o realizar pequeñas acumulaciones de objetos que sirvan como hitos. El resto de hormigas observa las marcas y actúa en consecuencia. El equipo de investigadores de Boston ha replicado este lenguaje mediante un sistema de sensores y radares que observa las condiciones del entorno natural y artificial.
 Termes, Universidad de Harvard, 2014.
Termes, Universidad de Harvard, 2014.
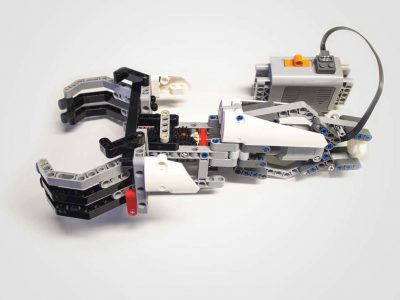
Las características físicas de los robots han sido cuidadosamente diseñadas para optimizar su movimiento, simplificar las tareas de computación y evitar que los errores de un único miembro se propaguen a todo el sistema. El desplazamiento del autómata se resuelve gracias a cuatro whegs, un mecanismo de locomoción que le permite desplazarse y evitar obstáculos con facilidad. Asimismo, un acelerómetro le ayuda a medir el impulso necesario para escalar los ladrillos. Cinco sónars de ultrasonidos actúan de sensor de movimiento y contribuyen a que el robot mantenga las distancias apropiadas con sus congéneres para no colapsar la circulación.
 Termes, Universidad de Harvard, 2014.
Termes, Universidad de Harvard, 2014.
Un brazo extensible asiste al robot en el transporte y manipulación de los bloques de construcción. Cada uno de estos bloques ha sido fabricado con espuma de uretano expandido y dispone de un imán que facilita el alineamiento y enganche de los distintos bloques.
 Termes, Universidad de Harvard, 2014.
Termes, Universidad de Harvard, 2014.
El robot posee un patrón secuencial sencillo en apariencia, pero complejo si atendemos al resultado global: el autómata recoge un ladrillo y se desplaza hasta la construcción; a continuación, busca un hueco libre en el primer nivel donde depositar el bloque; si no lo encuentra, el robot accede al siguiente nivel escalando por la misma estructura; en el caso de que no pueda escalar, el ladrillo del robot contribuye a edificar una escalera. Una vez depositado el bloque, retorna a la pila de bloques y reinicia su proceso.
La inteligencia colectiva del sistema está preparada para recobrarse de errores imprevistos durante el proceso de construcción, como pequeños derrumbes o mal funcionamiento de las unidades. Este hecho hace que TERMES sea especialmente apropiado para construcciones situadas en entornos hostiles, como desastres naturales o planetas extraterrestres.

Termes, Universidad de Harvard, 2014.





In cre ible